毫米波 相机 超声 超声波
【深度相机调研(精简)】excel表格 22/11/15
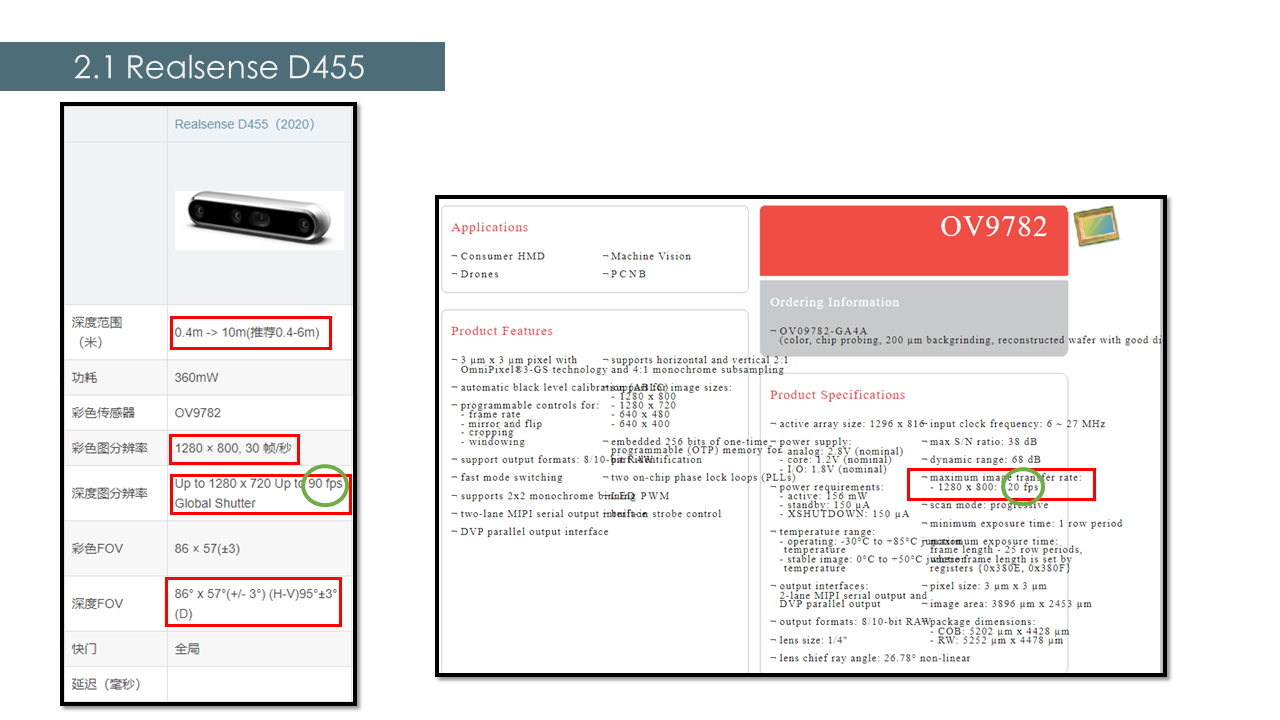
序号 ZHI Sensor D132 深度技术 公司 1280 × 1024(红外图) 彩图分辨率和帧率 视场角HVD 工作距离 深度精度 结构光类型 其他 1 Realsense455 双目 Intel 精度 0.1-0.56mm(≤ 1.17FPS) 86 X 57 X 95 0.4-10m 散 ......
【双目相机产品调研整理】22/12/01
  坐标系变换](https://www.bilibili.com/video/BV1C54y1B ......
OpenCV相机标定
# OpenCV相机标定 ## 相机内参矩阵cameraMatrix $$ cameraMatrix = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} $$ ## 相机畸变系数distCoeffs ......
张正友的相机标定论文Flexible camera calibration by viewing a plane from unknown orientations的翻译
张正友的相机标定论文Flexible camera calibration by viewing a plane from unknown orientations的翻译: 翻译的pdf版本为:http://pan.baidu.com/s/1pKshsPP 翻译 搜索 复制 ......
直播平台开发中申请录音与相机权限
现在当我们打开APP平台的时候,都会提醒我们要获取权限,相机、定位、录音等。获取该权限让我们在之后使用APP时会更加的方便,下面的文章就给大家介绍下直播平台开发中申请录音与相机权限。 一、直播平台开发app向系统申请录音与相机权限 app 必须先具备如下权限(本文只讨论录音与相机) AndroidM ......
MAUI Blazor调用相机扫码(安卓)
由于MAUI Blazor和原生的MAUI不一样,MAUI Blazor是嵌套webview实现的,页面是Razor组件组成;我们在申请设备权限的适合,必须向webview申请权限; # 1.修改AndroidManifest.xml 修改Platforms\Android\AndroidManif ......
VTK 实例7:相机控制
未加入相机控制时演员位置: 加入相机控制时演员位置(视角为x轴负方向): 1 #include "vtkAutoInit.h" 2 VTK_MODULE_INIT(vtkRenderingOpenGL2); 3 VTK_MODULE_INIT(vtkInteractionStyle); 4 5 #i ......
VTK 实例8:command与observe设计模式(当交互使相机变化时打印出当前相机的坐标,当发生拾取演员事件时,演员设置为红色)
1 #include "vtkAutoInit.h" 2 VTK_MODULE_INIT(vtkRenderingOpenGL2); 3 VTK_MODULE_INIT(vtkInteractionStyle); 4 #include <vtkConeSource.h> 5 #include <vt ......
VTK 实例4:两种交互方式(操纵相机与操纵演员)
1 #include "vtkAutoInit.h" 2 VTK_MODULE_INIT(vtkRenderingOpenGL2); 3 VTK_MODULE_INIT(vtkInteractionStyle); 4 5 #include <vtkConeSource.h>//源数据 6 #incl ......
centos7中用docker部署java项目调用mvs海康相机拍照踩坑
一、海康机器人官网下载MVS V2.1.2 (Linux) 二、解压后将tar.gz包传入centos7中 三、解压并安装MVS 安装 四、执行MVS,并查看环境变量是否正确 安装后会新增/opt/MVS目录,进入/opt/MVS/bin目录执行./MVS 执行完成后查看是否已经自动添加环境变量,执 ......
相机是如何对焦的
## “对焦”和“变焦” 对焦,也叫调焦、合焦,它是指通过移动镜头光心或者传感器的位置,来调节传感器与镜头之间的相对距离,从而达到让成像清晰的效果。 变焦是指通过移动镜头内部镜片组,来改变镜头的焦距,从而改变图像中的视场范围的效果([示意视频](https://www.zhihu.com/zvide ......
基于Field_II_ver_3_24_windows_gcc工具箱的超声波二维成像与三维成像matlab仿真
1.算法理论概述 1. 1超声波成像的基本原理 超声波成像是一种通过超声波对物体进行成像的技术。超声波成像的原理是利用超声波在不同组织之间传播速度不同的特点,探测物体内部的结构。超声波成像可以分为二维成像和三维成像两种。二维成像是将超声波探头沿一个方向扫描目标物体,得到一系列沿该方向的回波信号,通过 ......
相机模型总结
## 相机模型 ### 针孔相机模型 利用相似三角形 $\frac{D_{世界}}{D_{相机}}=\frac{H}{F}$ 其中: - $D_{世界}$为世界坐标系中的距离长度,如一本书的长宽。 - $D_{相机}$为相机坐标系下的距离长度,为像的大小,或在cmos底片上的大小距离。 - $H$为 ......
美的(Midea)超声波清洗机 眼镜清洗机 超声波洗眼镜 首饰剃须刀手表假牙牙套化妆刷 洗眼镜机超声波 MXV-01 —— 工业设计上的重大问题分析
前段时间买了一个美的的超声波清洗机,就是那种超声波洗眼镜的那种,本着买个高档的可以分体的那种好清洗的原则,就在JD上千挑万选后买了下面的这个货: 链接地址: https://item.jd.com/100037217483.html 美的(Midea)超声波清洗机 眼镜清洗机 超声波洗眼镜 首饰剃须 ......
C#海康相机SDK二次开发
两种方式: 第一种:使用海康提供的MyCamera.cs类,使用动态链接库的方式,这种方式必须安装MVS客户端(客户端安装的时候会将需要用到的依赖文件一并安装,如果不想安装MVS,就必须到海康官网下载“机器视觉工业相机SDK V3.5.0版本Runtime组件包”),并使用MyCamera.cs这个 ......
相机最大连拍数目
参考如下修改:相机连拍时对应代码逻辑: vendor/mediatek/proprietary/packages/apps/Camera2/feature/setting/continuousshot/src/com/mediatek/camera/feature/setting/Continuou ......
使用手机相机检测电脑屏幕刷新率Hz
# 使用手机相机检测电脑屏幕刷新率Hz 1、电脑打开`https://www.testufo.com/frameskipping`  左边的两个进度条是这个样子的,朝向他们自己的“面向”,和 ......
CA_CFAR 单元平均恒虚警处理在毫米波测距中的应用
最近的一个任务,在24MHZ毫米波测距的程序里 加入恒虚警处理。 毫米波测距原理网上有很多资料,其中程序里用到的是调频连续波雷达(FMCW)。 相关原理在博客有介绍。 主要依据是测量发射波和回波的时间差,根据光速计算距离。 实际应用中要考虑多普勒频移对回波的影响。 图中发射波为正负调频FMCW信号, ......
cesium 相机以某点为中心旋转
renderTargetCamera() { const { viewer } = this.state const _this = this viewer.camera.moveEnd.addEventListener(function () { const { gpsamera, cameraH ......
wiaacmgr 提供了一个用户界面,用于配置和管理与计算机连接的图像扫描仪、数码相机和其他图像捕获设备。它允许用户选择扫描分辨率、图像格式、目标文件夹等选项,并提供图像预览功能。通过 wiaacmgr,用户可以控制并管理与图像捕获设备相关的设置和操作
"wiaacmgr" 是 Windows 操作系统中的一个可执行文件,全称为 "Windows Image Acquisition Automation Layer"。它是用于管理图像捕获设备的用户界面工具。 以下是关于 "wiaacmgr" 的一些说明: 功能:wiaacmgr 提供了一个用户界面 ......
WPDShextAutoplay是Windows Portable Devices Shell Extension Autoplay的缩写,它是Windows操作系统中用于自动播放移动设备(如手机、平板电脑、相机等)插入时的功能
WPDShextAutoplay是Windows Portable Devices Shell Extension Autoplay的缩写,它是Windows操作系统中用于自动播放移动设备(如手机、平板电脑、相机等)插入时的功能。 WPDShextAutoplay允许Windows操作系统检测移动设 ......
张正友相机标定流程(程序)
写在前面 OpenCV存储数据的方式: 比如所有图像的角点坐标我可以定义一个对象: InputArrayOfArrays _imagePoints InputArray这个接口类可以是Mat、Mat_<T>、Mat_<T, m, n>、vector<T>、vector<vector<T>>、vect ......
【开机10】解决出现问题,你的PIN不可用,单击以重新设置PIN 无法打开相机 设置我的PIN 登录选项 诊断启动禁用服务后问题解决
$弄了1.5个小时,找到这个视频,终于弄好了!!!!!!$ $如果各位基友出现这种问题,可以参考。$ [【开机10】解决出现问题,你的PIN不可用,单击以重新设置PIN 无法打开相机 设置我的PIN 登录选项 诊断启动禁用服务后问题解决](https://www.bilibili.com/video ......